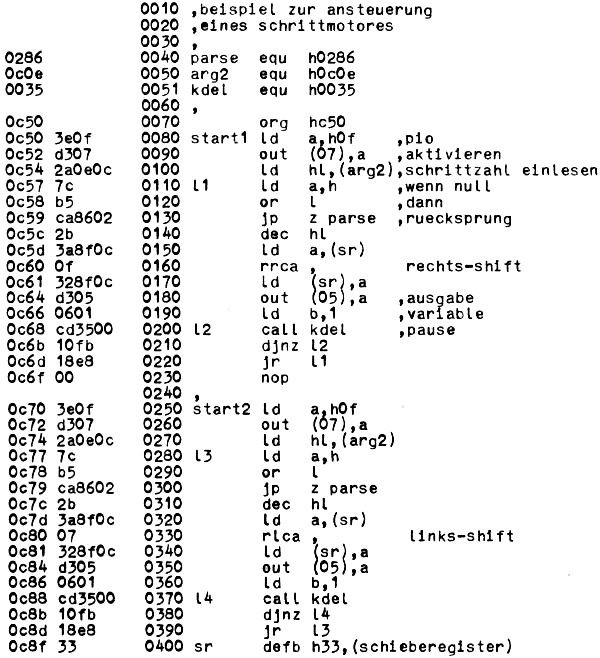
Beispiel für die Ansteuerung eines Schrittmotores
Wir nehmen an,der Schrittmotor sei über Bit 0 und 1 des Ports 05 der
PIO
angeschlossen und die anderen Ausgänge des Ports seien unbenutzt.
Man gibt EC50 bzw. EC70,gefolgt von einem Leerraum und der gewünschten
hexadezimalen Schrittzahl ein. Nach „New Line“ läuft der
Motor je nach gewählter Startadresse die eingegebene Schrittzahl nach
rechts oder links und bleibt dann wieder stehen.