Prinzip der Ansteuerung für einen Schrittmotor
Die zwei Spulen eines Schrittmotores werden,wie im
Nascom-Journal 3/80
beschrieben im Viertaktbetrieb angesteuert und die Stromrichtung in
jeder Spule durch eine 1 bzw. 0 am Ausgang der PIO
bestimmt. Bei einer
fortlaufenden Weiterschaltung des Motors in eine Richtung müssen
folgende Bit-Kombinationen an den entsprechenden Ausgängen der PIO
vorliegen:
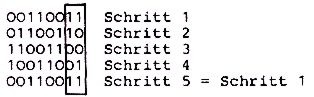
Schritt 1: 11
Schritt 2: 10
Schritt 3: 00
Schritt 4: 01
Dieses Muster erhält man,wenn man das 8-bit-Wort 33h=
00110011 durch einen RRC- oder RLC-Befehl laufend nach rechts oder
links rotiert und dabei nach jedem Schritt die zwei rechten Bits
beobachtet. Deren Wert gibt man an die PIO
weiter.
Da bei dieser Ansteuerungsart die absolute Positionierung nur über
einen Bereich von vier Schritten erfolgen kann, muß man gleichzeitig
mit jedem Schritt nach rechts oder links einen Positionszähler hoch-
oder herunterzählen. So hat man im Mikrocomputer ständig eine Angabe
über die absolute Position des Schrittmotores. Selbstverständlich kann
der Mikroprozessor die einzelnen Bitmuster so schnell berechnen,daß der
Schrittmotor nicht mehr mitkommt. Deshalb muß nach jedem Schritt eine
Pause eingelegt werden,damit der Motor in die neue Position schwingen
kann. Mit dieser Pause hat man die Möglichkeit,die Drehzahl des
Schrittmotores ohne die Hilfe eines mechanischen Getriebes quasi
stufenlos zu verändern und hat doch eine reproduzierbare,quarzgenaue
Geschwindigkeit.